Robots
These are robots I've worked with.
mARVin - Michigan Autonomous Robotic Vehicle (ARV)
I worked on SLAM algorithms and the configuration and integration of sensors. Stuff like IMUs, wheel encoders, and Velodyne LiDAR sensors. Big picture, we construct a "map" that the navigation team can work with to do path planning with. Now I'm the lead of this team in charge of the things involving sensors and perception.Fetch
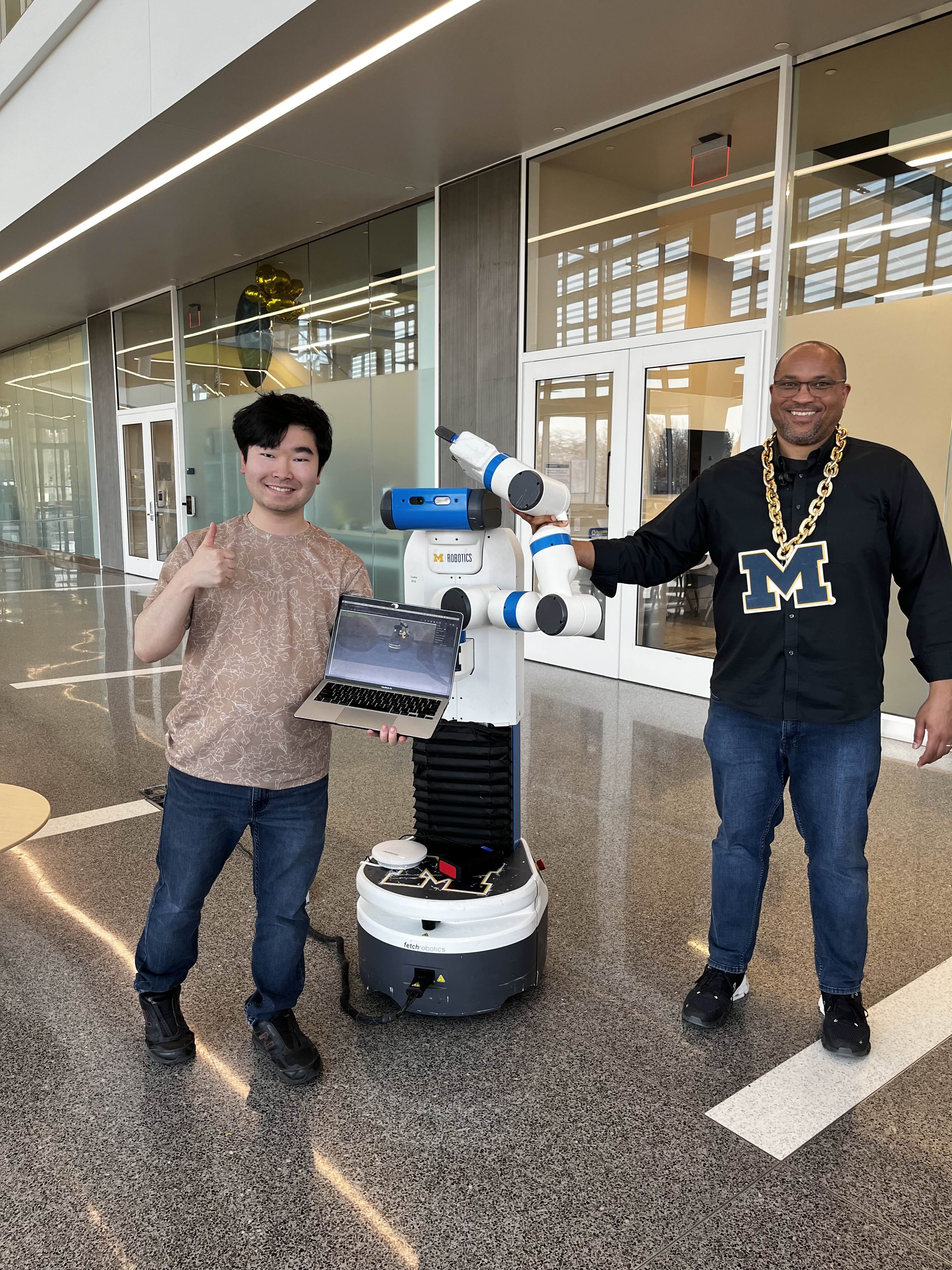
That's me and Professor Chad Jenkins with the robot. Thank you for helping me achieve my high school dreams! (Which was to get my code to work on the actual fetch robot, the first lab robot I ever got to see in person) Notice how the robot's pose is matching the simulation. The software and robot communicate via rosbridge so its movement is in sync and can control the robot hardware.
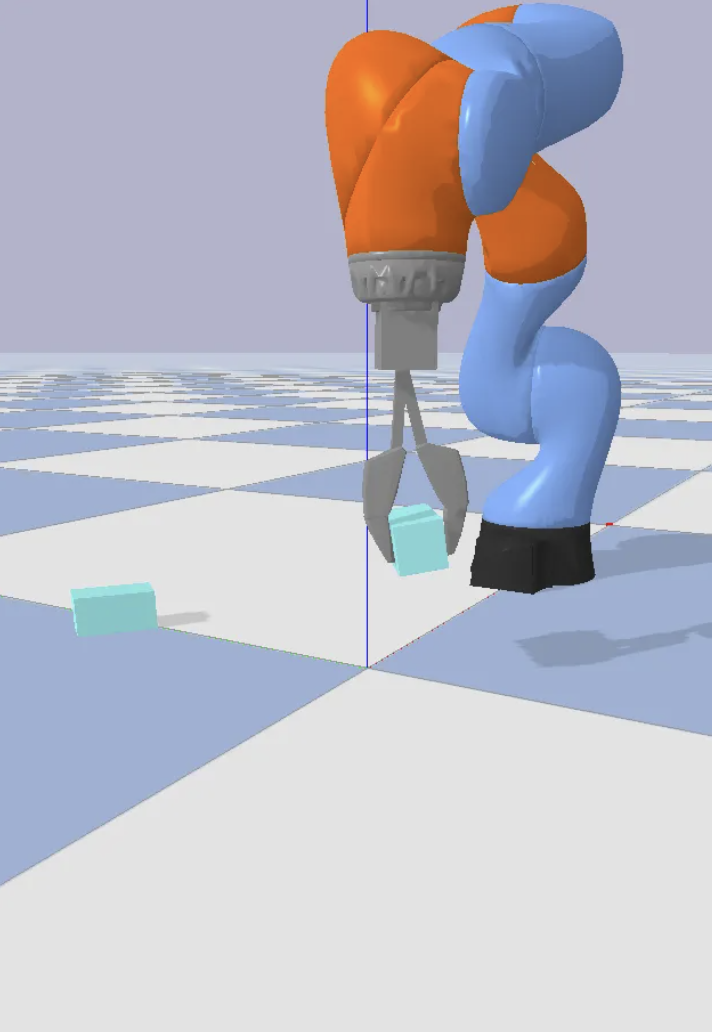
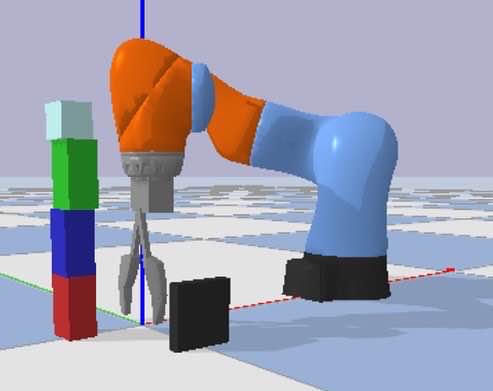

Kuka LBR iiwa arm
Bin picking and stacking while ensuring force closure regardless of objects via an antipodal grasp. The decision of what object to pick up is based on depth sensing from stereo cameras.
Cassie and Digit
Under the mentorship of Professor Jessy Grizzle and Dr. Wami Ogunbi! here's Cassie:
and here's Digit:
